































Kokonaisvoittaja: Bullseye-tiimi Wageningenin yliopistosta, Hollannista; Freestyle-tehtävät visionäärisillä konsepteilla; Kenttäsimulaatio osoittautuu haasteeksi, jolla on suuria oppimishyötyjä; Yli 500 kansainvälistä katsojaa verkossa kolmen päivän aikana
(DLG) Yhteistyökumppanina DLG Feldtage ja tänä vuonna ensimmäistä kertaa virtuaalimuodossa DLG:n digitaalisella alustalla 18. kansainvälinen Field Robot Event, kansainvälisten opiskelijajoukkueiden kenttärobottikilpailu, päättyi huippunopeaan ilmoitukseen voittajat, jotka esittivät järjestäjät, Hohenheimin yliopisto ja Wageningenin yliopisto. Vuoden 2021 tapahtuman kokonaisvoittaja on Hollannin Wageningenin yliopiston Bullseye-tiimi, joka arvioitiin suorituksensa perusteella neljässä kenttätehtävässä, joihin sisältyi navigointi kaarevissa maissiriveissä, suorissa riveissä puuttuvien kasvien kanssa tai ilman, rikkakasvien ja pentueen tunnistaminen. ja sen jälkeen siirtäminen päisteelle. Freestyle-tapahtuman, valinnaisen tapahtuman, jossa opiskelijajoukkueet voivat esitellä insinööritaitojaan itse valitun maataloustehtävän ratkaisemisessa, voitti Münsterin ammattikorkeakoulun Ceres-tiimi sadonkorjuurobotilla, joka pystyi havaitsemaan ja poimimaan kurpitsaa. .
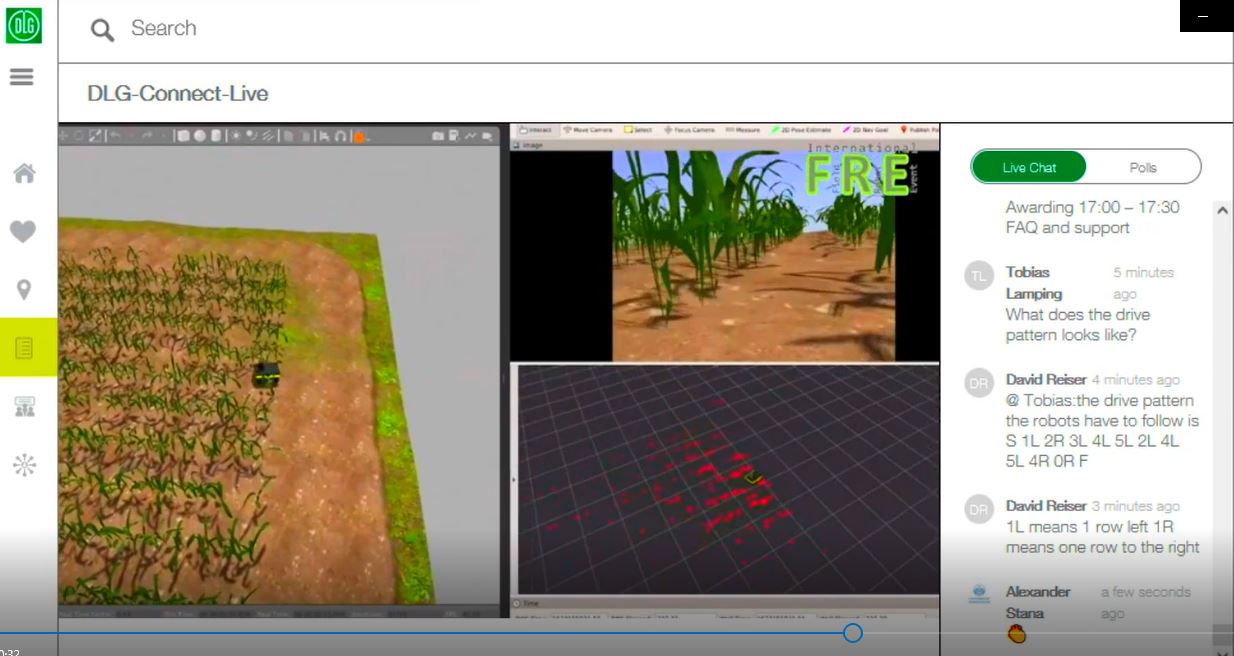
518 kansainvälistä katsojaa seuraa
Tapahtuma keräsi 518 katsojaa eri puolilta maailmaa. Mukana oli paitsi teknisiä ja akateemisia asiantuntijoita, insinöörejä, yliopiston henkilökuntaa ja opiskelijoita, myös maanviljelijöitä useista maista. Alan osallistujat, kuten tuotepäälliköt, osallistuivat myös live-tapahtumaan, jota kansainväliset toimittajat uutisoivat ja virittivät katsomaan robottien esiintymistä fotorealistisessa simulaatioympäristössä, joka on samanlainen kuin NASAn avaruustutkimuksessa käyttämä ympäristö. Live-chatin kautta katsojilla oli mahdollisuus olla vuorovaikutuksessa 14 kansainvälisen joukkueen kanssa Tanskasta, Saksasta, Hollannista, Romaniasta ja Sloveniasta sekä asiantuntijoista ja muista katsojista.
Yhteistyöpalkinto virtuaalisten maissipeltojen kehittämisestä
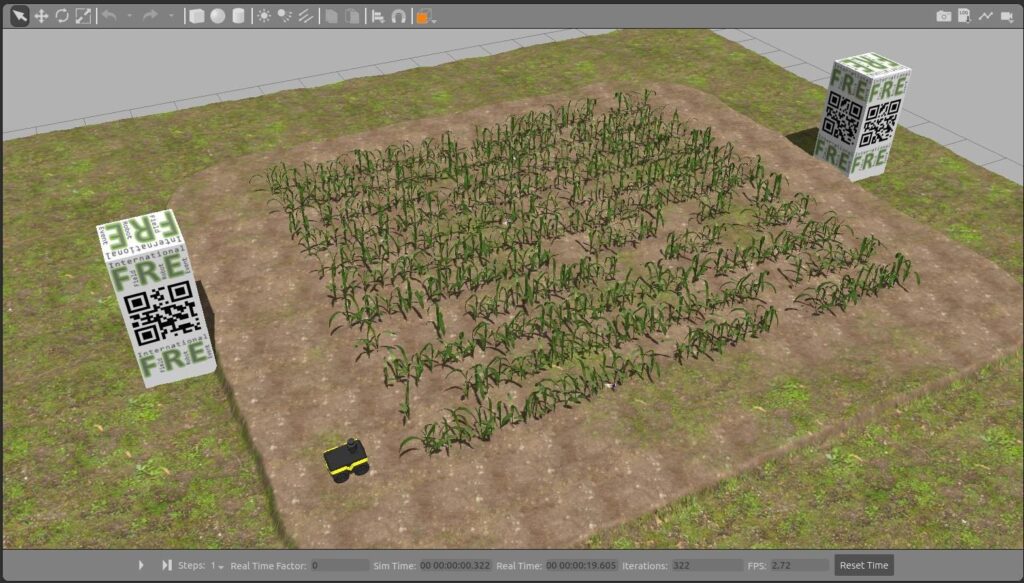
Yhteistyöpalkinto myönnettiin Kamaro Engineeringille, innovatiivisten kenttärobottien opiskelijatiimille Karlsruhe Institute of Technologysta (KIT). Yhteistyöpalkinnolla tunnustetaan panos virtuaalisen maissipellon kehittämiseen simuloiduissa ympäristöissä. Tähän työhön sisältyi koodin kirjoittaminen, joka kuvasi tarkasti, miltä maissikasvi ja muut komponentit näyttävät, sekä tosielämän efektien, kuten tuulen ja varjojen, luominen useiden viljelykasvien skenaarioiden toteuttamiseksi, erityisesti rikkakasvien ja esteiden havaitsemiseksi.
Kaksi kouluikäisten kykyjen joukkuetta
Tänä vuonna kaksi joukkuetta – Carbonite ja Camper Robotic – koostuivat kouluikäisistä teknisistä kyvyistä omaavista lapsista Saksan Hampurista ja Überlingenistä. Camper Robotic -tiimi oli kehittänyt ainutlaatuisen "Segway"-tyyppisen robotin nimeltä Field Balancer. Carbonite-tiimi menestyi useissa tehtävissä ja sijoittui kokonaiskilpailussa kolmanneksi.
”Tämä virtuaalitapahtuma oli ensi-ilta ja olemme erittäin tyytyväisiä tulokseen ja opiskelijoiden palautteeseen. Simuloitu ympäristö on suuri osa kenttärobotin kehitystyötä. Uskon, että tämä tapahtuma, joka järjestetään livenä simuloidussa ympäristössä, on hieno ja haastava harjoitus paitsi selvittää, mihin järjestelmä pystyy, myös vertailla sitä muiden joukkueiden kanssa. Tällä on merkittäviä oppimishyötyjä tulevina kuukausina”, sanoi prof. Hans W. Griepentrog, johtaja, kasvituotannon teknologiaosasto, Hohenheimin yliopisto, Saksa.
”Erityisesti tätä tapahtumaa varten luomamme ROS Gazebo -simulaatioympäristöt ovat olleet hyödyksi opiskelijatiimeille ja siksi olemme päättäneet pitää ne saatavilla kilpailun jälkeen, jotta opiskelijat voivat testata tulevia kenttärobottisimulaatioita kyseisellä alustalla. ” sanoi prof. Griepentrog.
Freestyle-tapahtuma – tulevaisuuden konsepteja
Tapahtuman freestyle-tehtävä on aina katsojien kohokohta ja tarjoaa ikkunan tulevaisuuteen visionäärisellä kenttäsovelluskonseptilla, jotka joukkueet ovat itse valinneet ja kehittäneet. Kilpailun valinnaisena kategoriana tehtävä tarjosi opiskelijatiimeille mahdollisuuden näyttää taitojaan kehittää ratkaisua valitsemaansa käytännön kenttätehtävään. Tämän vuoden tapahtumassa opiskelijat esittivät freestyle-tehtävät videoina. Freestyle-tehtäviin kuului sadonkorjuurobotti Ceresistä, joka voitti freestyle-kategorian. Toiseksi tulee FarmBeast-tiimin, Mariborin yliopiston, kehittämä ruiskutuslaite, joka pystyi tunnistamaan rikkaruohot ja kohderuiskutuksen vain tarvittaessa, mikä edistää maaperän suojelua. Kolmannella sijalla oli Kamaro-tiimi Beteigeuze-kenttärobottillaan, joka esitteli itsensä modulaarisena itsekonfiguroivana peltorobottina, jossa on useita lisälaitteita, mukaan lukien perävaunupohjaiset työkoneet.
Kansainvälinen kenttärobottitapahtuma on kansainvälinen kenttärobottikilpailu, joka sisältää erilaisia kenttätehtäviä. Robotin navigoiminen kaarevien viljelyrivien välillä, rikkaruohojen tai yksinkertaisesti roskien kohteiden tunnistaminen ja kohteiden kartoitus georeferenssin avulla ovat osa haasteita, joita peltorobotit ratkaisevat sensoreilla ja algoritmeilla. Tietojen tulkitseminen reaaliajassa, kuten rikkaruohojen määrittäminen kameran avulla, on monimutkaista ja vaatii useiden kuukausien kehitystyötä. Lisätehtävänä oli rikkaruohojen ja kuivikkeiden poistaminen, jossa tarvitaan työkalua käyttävien toimilaitteiden tarkkaa ohjelmistoohjausta. Haasteena on älykäs hahmottaminen päivän datasta, jolloin robotti tulkitsee annetut tiedot ja tekee optimaaliset päätökset. Monimutkaisuus, suorituskyky ja maatalouskelpoisuus olivat tärkeitä arviointikriteereitä.
Kilpailuvideoita saatavilla
Kolmen päivän kenttärobottitapahtuman videot, jotka sisältävät kaikki simuloidut kenttätehtävät, tuomareiden kommentit ja joukkueiden freestyle-tehtävään lähettämät videot, ovat saatavilla DLG:n verkkoalustalla erillisinä linkeinä kullekin tapahtumapäivälle:
8. kesäkuuta: Navigointi maissipellolla kaarevilla riveillä; Suorat rivit puuttuvilla kasveilla. Linkki
9. kesäkuuta: Rikkakasvien ja esineiden havaitseminen ja georeferenssi; siirtäminen päisteelle. Linkki
10. kesäkuuta: Freestyle-tapahtuma. Linkki
Täydelliset tiedot kunkin viiden luokan voittajista ja heidän pisteistään ovat saatavilla osoitteessa. https://www.fieldrobot.com/event/
Kansainvälinen peltorobottitapahtuma järjestettiin DLG:n digitaalisella alustalla, joka on myös suurten digitaalisten maataloustapahtumien koti. Alusta on yhteysalusta, joka tarjoaa käyttäjilleen sekä tuotesisältöä että yksilö-, ryhmä- tai julkista vuorovaikutusta.
Käytännön kenttärobottitutkimusta vuodesta 2003
Alankomaiden Wageningenin yliopiston vuonna 2003 käynnistämä kenttärobottikilpailu testaa uraauurtavaa robotiikkaa ja tarkkuusviljelyteknologioita todellisissa olosuhteissa ja antaa nuorille tutkijoille mahdollisuuden vaihtaa ja kehittää ideoitaan vertaistensa kanssa. Kuten kenttätapahtumassa, myös virtuaalitapahtumassa kilpailijoilla oli mahdollisuus olla vuorovaikutuksessa keskenään ja kansainvälisten katsojien kanssa. Tämä vuorovaikutus on tärkeä osa tapahtumaa ja auttoi heitä edistämään konseptiaan.
DLG-Feldtage-näyttelyssä vuodesta 2021 lähtien pidetty Field Robot Event 2014 tarjosi vaativia virtuaalikokeita roboteille ja niiden keksijöille sekä jännittävää viihdettä virtuaalikatsojille.]

{kind=link}